Spring 2018
Assignment 5
Out: Monday April 16
Due:
Face detection with a sliding window

Resources
- VL Feat Matlab reference: http://www.vlfeat.org/matlab/matlab.html
- Download the provided materials (68 MB)
Download the provided extra test scenes,the images we took in class (46 MB).
- Download VLFeat 0.9.20 binary package
Overview
The sliding window model is conceptually simple: independently
classify all image patches as being object or non-object.
Sliding window classification has long been a dominant paradigm
in object detection and for one object category in particular --
faces -- it is one of the most noticeable successes of computer
vision for category-level detection. For example, modern cameras
and photo organization tools have prominent face detection
capabilities. These success of face detection (and object
detection in general) can be traced back to influential works
such as Rowley
et al. 1996 and Viola-Jones
2001, and forward to recent successes with convolutional
neural networks for object detection like Faster R-CNN.
You can look at these papers for suggestions on how to implement
your detector. However, for this project you will be
implementing the simpler (but still very effective!) sliding
window detector of Dalal
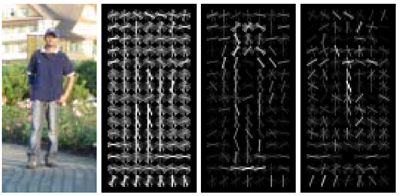
and Triggs 2005. Dalal-Triggs focuses on representation
more than learning and introduces the SIFT-like Histogram of
Gradients (HoG) representation (pictured to the right). You will
not be asked to implement HoG. You will be responsible for the
rest of the detection pipeline -- handling heterogeneous
training and testing data, training a linear classifier, and
using your classifier to classify millions of sliding windows at
multiple scales. Fortunately, linear classifiers are compact,
fast to train, and fast to execute. A linear SVM can also be
trained on large amounts of data, including mined hard
negatives.
Details and Starter Code
The following is an outline of the stencil code (see links for provided code and VLFeats library download above):
proj4.m. The top level script for training and testing your object detector. If you run the code unmodified, it will predict random faces in the test images. It calls the following functions, many of which are simply placeholders in the starter code:get_positive_features.m(you code this). Load cropped positive trained examples (faces) and convert them to HoG features with a call tovl_hog.get_random_negative_features.m(you code this). Sample random negative examples from scenes which contain no faces and convert them to HoG features.classifier training(you code this). Train a linear classifier from the positive and negative examples with a call tovl_trainsvm.run_detector.m(you code this). Run the classifier on the test set. For each image, run the classifier at multiple scales and then callnon_max_supr_bboxto remove duplicate detections.evaluate_detections.m. Compute ROC curve, precision-recall curve, and average precision. You're not allowed to change this function.visualize_detections_by_image.m. Visualize detections in each image. You can usevisualize_detections_by_image_no_gt.mfor test cases which have no ground truth annotations (e.g. the class photos).
Creating the sliding window, multiscale detector is the most
complex part of this project. It is recommended that you start
with a single scale detector which does not detect faces
at multiple scales in each test image. Such a detector will not
work nearly as well (perhaps 0.3 average precision) compared to
the full multi-scale detector. With a well trained multi-scale
detector with small step size you can expect to match the papers
linked above in performance with average precision above 0.9.
Data
The choice of training data is critical for this task. Face detection methods have traditionally trained on heterogeneous, even proprietary, datasets. As with most of the literature, we will use three databases: (1) positive training crops, (2) non-face scenes to mine for negative training data, and (3) test scenes with ground truth face locations.
You are provided with a positive training database of 6,713 cropped 36x36 faces from the Caltech Web Faces project. This subset has already filtered away faces which were not high enough resolution, upright, or front facing. There are many additional databases available For example, see Figure 3 in Huang et al. and the LFW database described in the paper. You are free to experiment with additional or alternative training data for extra credit.
Non-face scenes, the second source of your training data, are easy to collect. You are provided with a small database of such scenes from the SUN scene database. You can add more non-face training scenes, although you are unlikely to need more negative training data unless you are doing hard negative mining for extra credit.
A benchmark for face detection is the CMU+MIT test set. This test set contains 130 images with 511 faces. The test set is challenging because the images are highly compressed and quantized. Some of the faces are illustrated faces, not human faces. For this project, we have converted the test set's ground truth landmark points in to bounding boxes. We have inflated these bounding boxes to cover most of the head, as the provided training data does. For this reason, you are arguably training a "head detector" not a "face detector" for this project.
Copies of these data sets are provided with your starter code
linked above in Resources.
Please do not include them in your submission on
Canvas.
Write up
In the report, please include the following:
- Describe your algorithm and any decisions you made to write
your algorithm a particular way.
- Show and discuss the results of your algorithm.
- Discuss any extra credit you did, and clearly show what contribution it had on the results (e.g. performance with and without each extra credit component).
- Show how your detector performs on additional imag
es in theextra_test_scenesdirectory (separate gzip file posted 4/19/18).
- Include the precision-recall curve and AP of your final classifier and any interesting variants of your algorithm.
Face detection contest
There will be extra credit and recognition for the five students who achieve the highest five average precision values, whether with the baseline classifier or any bells and whistles from the extra credit. You aren't allowed to modify
evaluate_all_detections.m
which measures your accuracy.Extra Credit
For all extra credit, be sure to analyze in your report cases
where your extra credit implementation has improved
classification accuracy. Each item is "up to" some amount of
points because trivial implementations may not be worthy of full
extra credit. A maximum of 15 extra
credit points are allowable.
Some ideas:
- up to 5 pts: Implement hard negative mining, as discussed in the Dalal and Triggs paper, and demonstrate the effect on performance.
- up to 10 pts: Implement a cascade architecture as in Viola-Jones. Show the effect that this has on accuracy and run speed. Describe your cascade building process in detail in your handout. Unfortunately, with the current starter code this is unlikely to improve run speed because the run time is dominated by image and feature manipulations, not the already fast linear classifier.
- up to 10 pts: Detect additional object categories. You'll need to get your own training and testing data. One suggestion is to train and run your detector on the Pascal VOC data sets, possibly with the help of their support code. The bounding boxes returned by the stencil code are already in VOC format.
- up to 5 pts: Find and utilize alternative positive training data to improve results. You can either augment or replace the provided training data.
- up to 10 pts: Add contextual reasoning to your classifier. For example, one might learn likely locations of faces given scene statistics, in the spirit of Contextual priming for object detection, Torralba. You could try and use typical arrangements of groups of faces as in Understanding Images of Groups of People by Gallagher and Chen.
- up to 5 pts: Experiment with alternative features or
additional features to improve accuracy.
For any of the above, be sure to explain clearly in your
report --- with quantitative results wherever relevant --- the
outcomes via experiments.
Handing in
Creating a single zip file to submit on Canvas. It should contain the following:
- README - text file containing anything about the project that you want to tell the TA
- code/ - directory containing all your code for this assignment
- report.pdf - writeup as described above.
- Be sure to prominently show your average precision results
from
evaluate_all_detections.m
on the test set for the sake of the contest.
How grades will be calculated
- +20 pts: Use the training images to create positive and and negative training HoG features.
- +15 pts: Train linear classifier.
- +45 pts: Create a multi-scale, sliding window object detector.
- +20 pts: Writeup with design decisions and evaluation.
- +15 pts: Extra credit (up to 15 points)
Advice, Tips
- Read the comments in the provided code.
- The starter code has more specific advice about the necessary structure of variables through the code. However, the design of the functions is left up to you. You may want to create some additional functions to help abstract away the complexity of sampling training data and running the detector.
- You are free to play with any parameters. To give a
starting point, HoG cell sizes of 6 are reasonable.
Positive patch sizes of 36 x 36 pixels (as given in the code)
are reasonable. Negative patch sizes of 36 x 36, 48 x
48, 72 x 72, sampled with step sizes of 48 are reasonable as a
starting point.
- On the test images from our classroom (in
extra_test_scenes/), we found a step size (window shift
amount) of 3 pixels to work well.
- You probably don't want to run non-max suppression while mining hard-negatives (extra credit).
- While the idea of mining for hard negatives is ubiquitous in the object detection literature, on this testbed it may only modestly increase your performance when compared to a similar number of random negatives.
- The parameters of the learning algorithms are important. The
regularization parameter
lambdais important for training your linear SVM. It controls the amount of bias in the model, and thus the degree of underfitting or overfitting to the training data. Experiment to find its best value. - Your classifiers, especially if they are trained with large amounts of negative data, may "underdetect" because of an overly conservative threshold. You can lower the thresholds on your classifiers to improve your average precision. The precision-recall metric does not penalize a detector for producing false positives, as long as those false positives have lower confidence than true positives. For example, an otherwise accurate detector might only achieve 50% recall on the test set with 1000 detections. If you lower the threshold for a positive detection to achieve 70% recall with 5000 detections your average precision will increase, even though you are returning mostly false positives.
- When coding
run_detector.m, you will need to decide on some important parameters. (1) The step size. By default, this should simply be the pixel width of your HoG cells. That is, you should step one HoG cell at a time while running your detector over a HoG image. However, you will get better performance if you use a fine step size. You can do this by computing HoG features on shifted versions of your image. This is not required, though -- you can get very good performance with sampling steps of 4 or 6 pixels. (2) The step size across scales, e.g. how much you downsample the image. A value of 0.7 (the image is downsampled to 70% of it's previous size recursively) works well enough for debugging, but finer search with a value such as 0.9 will improve performance. However, making the search finer scale will slow down your detector considerably. - Likewise your accuracy is likely to increase as you use more of the training data, but this will slow down your training. You can debug your system with smaller amounts of training data (e.g. all positive examples and 10000 negative examples).
- You can train and test a classifier with average precision
of 0.85 in about 60 seconds. It is alright if your training
and testing is slower, though. 5-10 minutes is not
unreasonable.
- The Viola-Jones algorithm achieves an average precision of 0.895* on the CMU+MIT test set based on the numbers in Table 3 of the paper (This number may be slightly off because Table 3 doesn't fully specify the precision-recall curve, because the overlap criteria for VJ might not match our overlap criteria, and because the test sets might be slightly different -- VJ says the test set contains 507 faces, whereas we count 511 faces). You can beat this number, although you may need to run the detector at very small step sizes and scales. We have achieved Average Precisions around 0.93.
Credits
This project was
originally created by Prof. James Hays of Georgia Tech,
who kindly gave us permission to use his project description
and code. Figures in this handout are from Dalal
and Triggs. Thanks also to
Chao-Yeh Chen and Kapil Krishnakumar for performing trial runs
of the assignment.
 |
 |
 |
 |
|
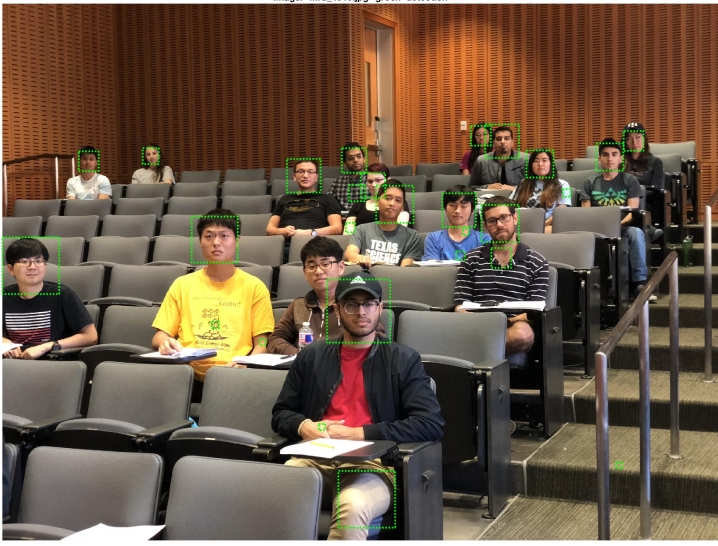
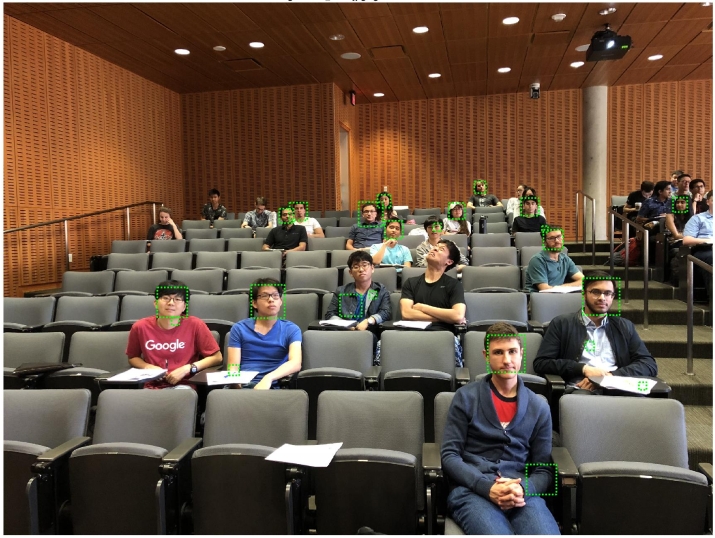
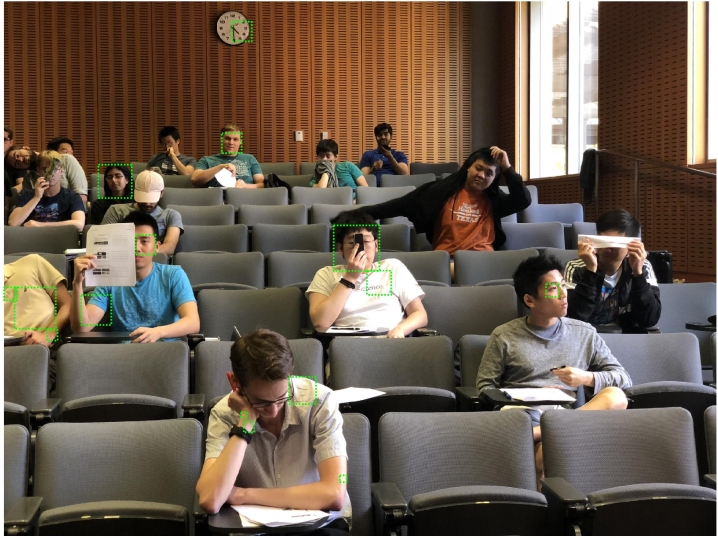
First we tried to make especially easy test cases with neutral, frontal faces. |
|
 |
 |
 |
 |
 |
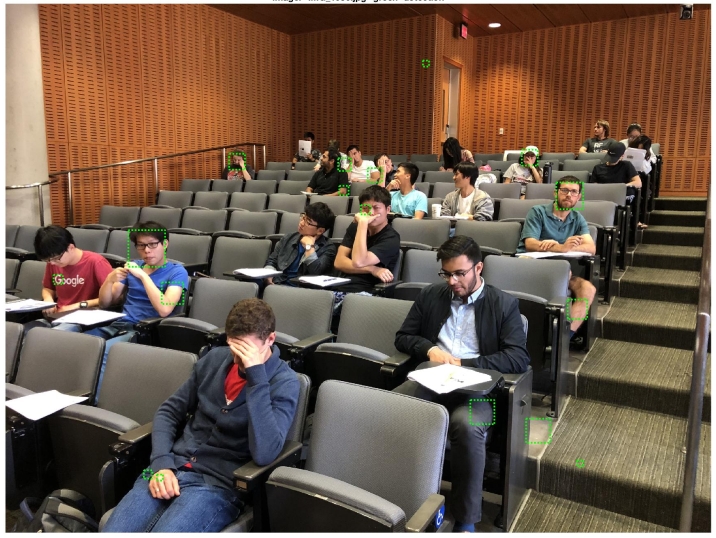 |
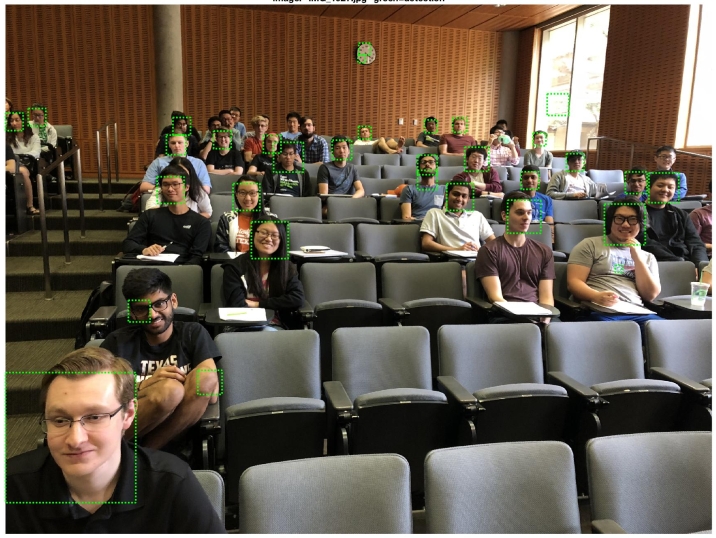
| Then the CS 376 class demonstrates how not to be seen by a robot. | |