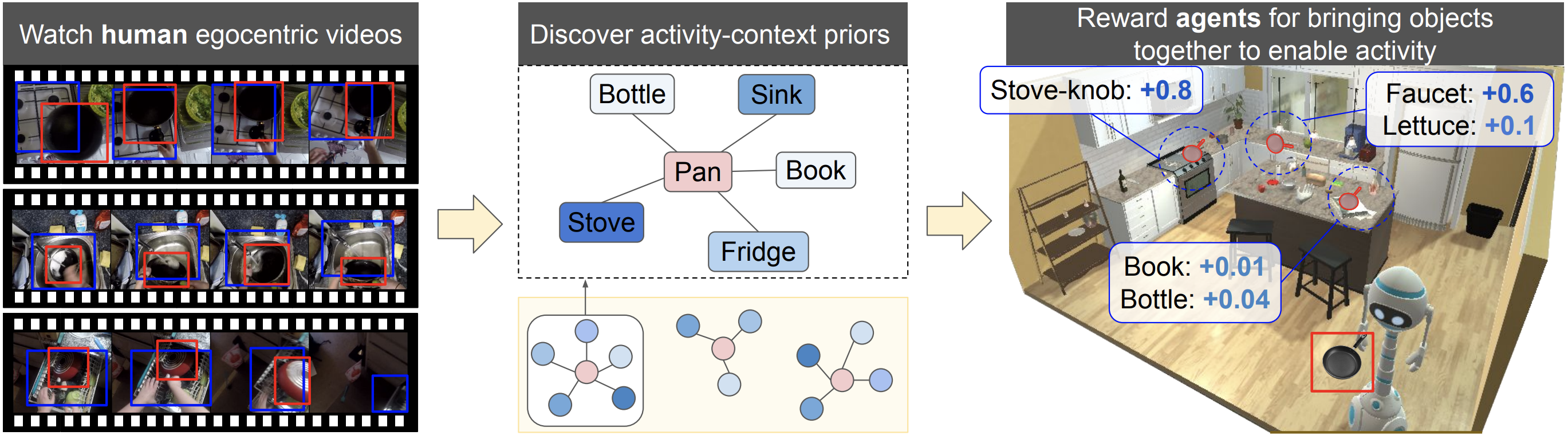
Complex physical tasks entail a sequence of object interactions, each with its own preconditions -- which can be difficult for robotic agents to learn efficiently solely through their own experience. We introduce an approach to discover activitycontext priors from in-the-wild egocentric video captured with human worn cameras. For a given object, an activity-context prior represents the set of other compatible objects that are required for activities to succeed (e.g., a knife and cutting board brought together with a tomato are conducive to cutting). We encode our video-based prior as an auxiliary reward function that encourages an agent to bring compatible objects together before attempting an interaction. In this way, our model translates everyday human experience into embodied agent skills. We demonstrate our idea using egocentric EPIC-Kitchens video of people performing unscripted kitchen activities to benefit virtual household robotic agents performing various complex tasks in AI2-iTHOR, significantly accelerating agent learning.
Teaser video
Cite
If you find this work useful in your own research, please consider citing:
@inproceedings{ego-activity-rewards,
author = {Nagarajan, Tushar and Grauman, Kristen},
title = {Shaping embodied agent behavior with activity-context priors from egocentric video},
booktitle = {NeurIPS},
year = {2021}
}